Product Description
Bosch CZPT final drive GFT36T3-67-06 For CZPT road roller gearbox.
REXROTH GFT26T2-62-02 For XIHU (WEST LAKE) DIS.N VIBRATING ROLLER YZ14HD Gearboxes
R988/8822 0571
R988/8822 0571
R9880 0571 5 GFT60W3B86-04
R9880 0571 9 GFT60T3B95-04
R9880 0571 8 GFT60T3B95-03
R9880 0571 4 GFT60T3B86-02
R988006308 GFT60T3B170-08
R988006307 GFT60T3B170-06
R988006300 GFT60T3B140-16
R988006296 GFT60T3B140-09
R988006293 GFT60T3B140-05
R988006285 GFT60T3B120-03
R988006277 GFT60T3B106-03
R988006276 GFT60T3B106-02
R988006268 GFT40W2B59-05
R988006265 GFT40W2B48-05
R988006249 GFT36W3B79-09
R988006234 GFT36W3-67-01
R988006226 GFT36T3B79-06
R988006216 GFT36T3B139-01
R988006215 GFT36T3B131-15
R988006203 GFT36T3B117-08
R988006191 GFT36T3-79-05
R988006190 GFT36T3-67-06
R988006187 GFT36T2B28-02
R988006180 GFT26W2B62-17
R988006176 GFT26W2B62-09
R988006168 GFT26W2B43-01
R988006156 GFT26T2B43-05
R988006143 GFT24T3B103-07
R988006136 GFT24T2B19-01
R988006119 GFT17W2B45-16
R988006118 GFT17W2B45-15
R988006105 GFT17T3B78-07
R988006093 GFT17T2B54-09
R988006086 GFT17T2B45-25
R988006077 GFT17T2B45-14
R988006071 GFT17T2B123
R988006066 GFT17T2-45-10
R988006063 GFT110W3B96-08
R988006061 GFT110W3B96-05
R988006058 GFT110W3B88-08
R988006044 GFT110W3B174-06
R988006040 GFT110W3B147-03
R988006039 GFT110W3B129-03
R988006037 GFT110W3B115-11
R988006036 GFT110W3B115-10
R988006035 GFT110W3B115-06
R988006034 GFT110W3B115-03
R988006032 GFT110T3B215-09
R988006031 GFT110T3B215-08
R988006030 GFT110T3B215-06
R988006571 GFT110T3B174-07
R988006571 GFT110T3B174-06
R988006019 GFT110T3B174-01
R988006571 GFB80T3B186-08
R988006008 GFB80T3B186-06
R988006007 GFB80T3B186-05
R98805716 GFB80T3B128-04
R98805713 GFB60T3B87-17
R98805710 GFB60T3B87-14
R98805719 GFB60T3B87-13
R98805718 GFB60T3B87-12
R98805713 GFB60T3B141-01
R98805712 GFB60T3B121-01
R98805711 GFB60T3B107-10
R98805718 GFB60T3B107-06
R98805717 GFB60T3B107-03
R98805715 GFB60T3-87-01
R98805710 GFB60T2B34-04
R98805718 GFB60T2B34-01
R98805713 GFB40T2B60-10
R98805715 GFB36T3B80-17
R9885713 GFB36T3B68-05
R9885712 GFB36T3B68-04
R9885711 GFB36T3B68-03
R9885710 GFB36T3B604
R98805712 GFB36T3B118-06
R98805711 GFB36T3B118-05
R9885719 GFB36T3B118-03
R9885718 GFB36T3B118-02
R9885716 GFB36T3B101-36
R9885711 GFB36T3B101-31
R988005909 GFB36T3B101-29
R988005903 GFB36T3B101-20
R988005895 GFB36T3B101-10
R988005881 GFB36T2B24-06
R988005876 GFB26T2B63-11
R988005873 GFB26T2B63-08
R988005872 GFB26T2B63-05
R988005862 GFB17T3B79-06
R988005835 GFB05T2-18-01
| Application: | Motor |
|---|---|
| Function: | Distribution Power |
| Layout: | Cycloidal |
| Hardness: | Hardened Tooth Surface |
| Installation: | Torque Arm Type |
| Step: | Three-Step |
| Customization: |
Available
| Customized Request |
|---|
Cyclone Gearbox Vs Involute Gearbox
Whether you’re using a cycloidal gearbox or an involute gearbox for your application, there are a few things you should know. This article will highlight some of those things, including: cycloidal gearbox vs involute gearbox, weight, compressive force, precision, and torque density.
Compressive force
Several studies have been carried out to analyze the static characteristics of gears. In this article, the authors investigate the structural and kinematic principles of a cycloidal gearbox. The cycloidal gearbox is a gearbox that uses an eccentric bearing inside a rotating frame. It has no common pinion-gear pair, and is therefore ideal for a high reduction ratio.
The purpose of this paper is to investigate the stress distribution on a cycloidal disc. Various gear profiles are investigated in order to study the load distribution and dynamic effects.
Cycloidal gearboxes are subject to compression and backlash, which require the use of proper ratios for the bearing rate and the TSA. The paper also focuses on the kinematic principles of the reducer. In addition, the authors use standard analysis techniques for the shaft/gear and the cycloidal disc.
The authors previously worked on a rigid body dynamic simulation of a cycloidal reducer. The analysis used a trochoidal profile on the cycloidal disc periphery. The trochoidal profile is obtained from a manufacturing drawing and takes into account the tolerances.
The mesh density in the cycloidal disc captures the exact geometry of the parts. It provides accurate contact stresses.
The cycloidal disc consists of nine lobes, which move by one lobe per rotation of the drive shaft. However, when the disc is rotated around the pins, the cycloidal disc does not move around the center of gravity. Therefore, the cycloidal disc shares torque load with five outer rollers.
A low reduction ratio in a cycloidal gearbox results in a higher induced stress in the cycloidal disc. This is due to the bigger hole designed to reduce the material inside the disc.
Torque density
Several types of magnetic gearboxes have been studied. Some magnetic gearboxes have a higher torque density than others, but they are still not able to compete with the mechanical gearboxes.
A new high torque density cycloidal magnetic gearbox using Halbach rotors has been developed and is being tested. The design was validated by building a CPCyMG prototype. The results showed that the simulated slip torque was comparable to the experimental slip torque. The peak torque measured was a p3 = 14 spatial harmonic, and it corresponds to the active region torque density of 261.4 N*m/L.
This cycloidal gearbox also has a high gear ratio. It has been tested to achieve a peak torque of 147.8 Nm, which is more than double the torque density of the traditional cycloidal gearbox. The design incorporates a ferromagnetic back-support that provides mechanical fabrication support.
This cycloidal gearbox also shows how a small diameter can achieve a high torque density. It is designed with an axial length of 50mm. The radial deflection forces are not serious at this length. The design uses a small air gap to reduce the radial deflection forces, but it is not the only design option.
The trade-off design also has a high volumetric torque density. It has a smaller air gap and a higher mass torque density. It is feasible to make and mechanically strong. The design is also one of the most efficient in its class.
The helical gearing design is a newer technology that brings a higher level of precision to a cycloidal gearbox. It allows a servomotor to handle a heavy load at high cycle rates. It is also useful in applications that require smaller design envelopes.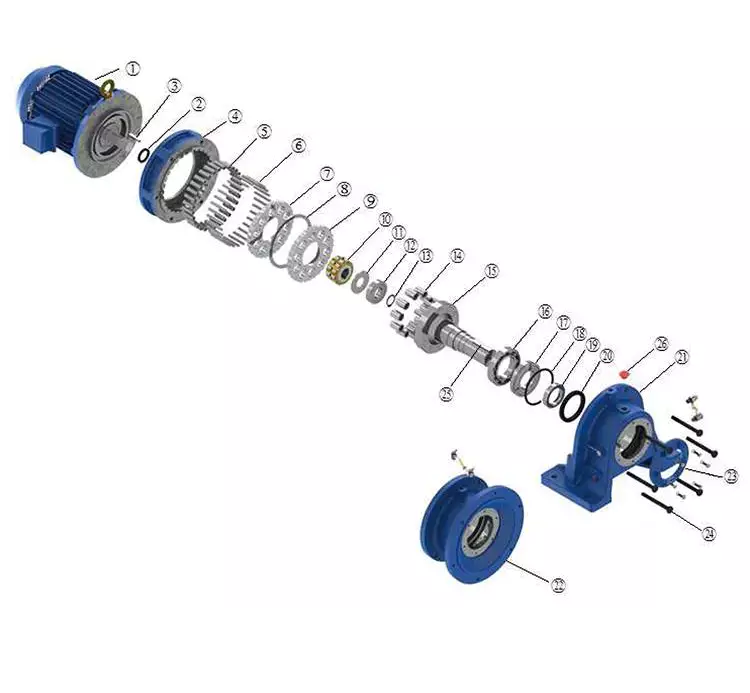
Weight
Compared to planetary gearboxes, the weight of cycloidal gearboxes is not as significant. However, they do provide some advantages. One of the most significant features is their backlash-free operation, which helps them deliver smooth and precise movement.
In addition, they provide high efficiency, which means that servo motors can run at higher speeds. The best part is that they do not need to be stacked up in order to achieve a high ratio.
Another advantage of cycloidal gearboxes is that they are usually less expensive than planetary gearboxes. This means that they are suitable for the manufacturing industry and robotics. They are also suited for heavy-duty robots that require a robust gearbox.
They also provide a better reduction ratio. Cycloidal gears can achieve reduction ratios from 30:1 to 300:1, which is a huge improvement over planetary gears. However, there are few models available that provide a ratio below 30:1.
Cycloidal gears also offer more resistance to wear, which means that they can last longer than planetary gears. They are also more compact, which helps them achieve high ratios in a smaller space. The design of cycloidal gears also makes them less prone to backlash, which is one of the major shortcomings of planetary gearboxes.
In addition, cycloidal gears can also provide better positioning accuracy. In fact, this is one of the primary reasons for choosing cycloidal gears over planetary gears. This is because the cycloid disc rotates around a bearing independently of the input shaft.
Compared to planetary gearboxes, cycloidal gears are also much shorter. This means that they provide the best positioning accuracy. They are also 50% lighter, meaning that they have a smaller diameter.
Precision
Several experts have studied the cycloidal gearbox in precision reducers. Their research mainly focuses on the mathematical model and the method for precision evaluation of cycloidal gears.
The traditional modification design of cycloidal gears is mainly realized by setting various machining parameters and center position of the grinding wheel. But it has some disadvantages because of unstable meshing accuracy and uncontrollable tooth profile curve shape.
In this study, a new method of modification design of cycloidal gears is proposed. This method is based on the calculation of meshing backlash and pressure angle distribution. It can effectively pre-control the transmission accuracy of cycloid-pin gear. It can also ensure good meshing characteristics.
The proposed method can be applied in the manufacture of rotary vector reducers. It is also applicable in the precision reducer for robots.
The mathematical model for cycloidal gears can be established with the pressure angle a as a dependent variable. It is possible to calculate the pressure angle distribution and the profile pressure angle. It can also be expressed as DL=f(a). It can be applied in the design of precision reducers.
The study also considers the root clearance, the backlash of gear teeth and the profile angle. These factors have a direct effect on the transmission performance of cycloidal gear. It also indicates the higher motion accuracy and the smaller backlash. The modified profile can also reflect the smaller transmission error.
In addition, the proposed method is also based on the calculation of lost motion. It determines the angle of first tooth contacts. This angle is an important factor affecting the modification quality. The transmission error after the second cycloid method is the least.
Finally, a case study on the CZPT RV-35N gear pair is shown to prove the proposed method.
Involute gears vs cycloidal gears
Compared to involute gears, cycloidal gears have a lower noise, less friction, and last longer. However, they are more expensive. Cycloidal gears can be more difficult to manufacture. They may be less suitable for certain applications, including space manipulators and robotic joints.
The most common gear profile is the involute curve of a circle. This curve is formed by the endpoint of an imaginary taut string unwinding from the circle.
Another curve is the epicycloid curve. This curve is formed by the point rigidly attached to the circle rolling over another circle. This curve is difficult to produce and is much more expensive to produce than the involute curve.
The cycloid curve of a circle is also an example of the multi-cursor. This curve is generated by the locus of the point on the circle’s circumference.
The cycloid curve has the same diameter as the involute curve, but is tangentially curving along the circle’s diameter. This curve is also classified as ordinary. It has several other functions. The FE method was used to analyze the strain state of cycloidal speed reducers.
There are many other curves, but the involute curve is the most widely used gear profile. The involute curve of a circle is a spiraling curve traced by the endpoint of an imaginary tautstring.
Involute gears are a lot like a set of Lego blocks. They are a lot of fun to play with. They also have a lot of advantages. For example, they can handle center sifts better than cycloidal gears. They are also much easier to manufacture, so the cost of involute teeth is lower. However, they are obsolete.
Cycloidal gears are also more difficult to manufacture than involute gears. They have a convex surface, which leads to more wear. They also have a simpler shape than involute gears. They also have less teeth. They are used in rotary motions, such as in the rotors of screw compressors.

editor by CX 2023-05-11